
12 февраля — принадлежащая Alibaba компания AutoNavi представила свои основополагающие модели ABot серии, включающие ABot-M0 для манипуляций роботов и ABot-N0 для навигации. Обе модели продемонстрировали всесторонние SOTA-результаты по 10 ведущим мировым бенчмаркам.
ABot-M0 позиционируется как первая в мире основополагающая модель унифицированной архитектуры для манипуляций роботов. Она стандартизирует системы координат, частоты управления и моделирование инкрементального движения для интеграции данных траекторий между платформами. Набор данных для обучения, полностью составленный из общедоступных источников, включает более 9 500 часов, 6 миллионов траекторий и данные, охватывающие более 20 воплощенных форм.

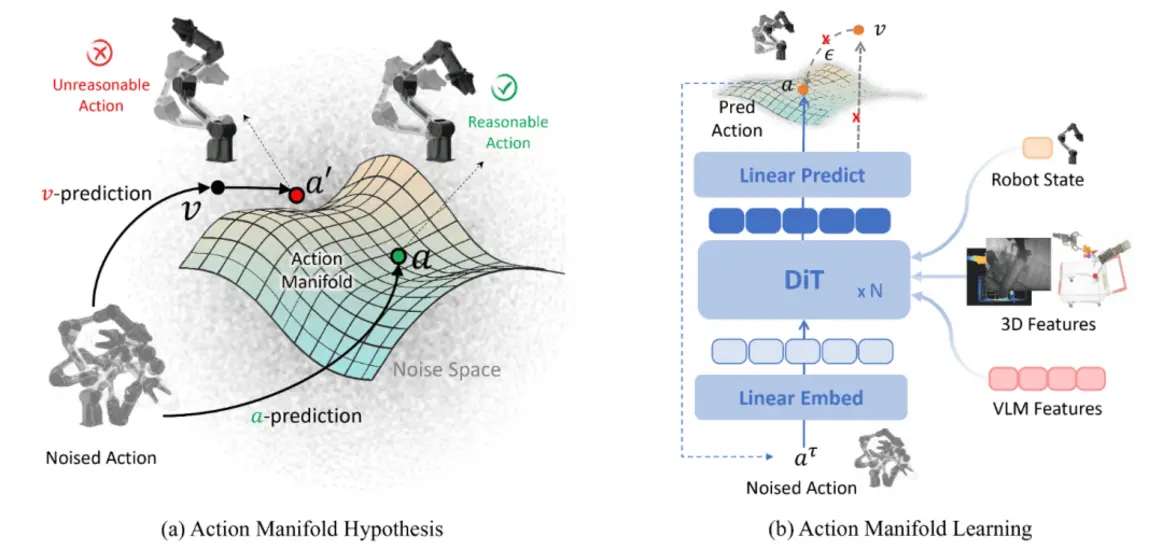
Алгоритмически команда представила метод Action Manifold Learning (AML) и интегрировала модули 3D-восприятия для улучшенного пространственного семантического понимания. На бенчмарке Libero-Plus ABot-M0 достигла 80,5% успешности выполнения задач, что почти на 30 процентных пунктов выше предыдущего лидирующего метода.
ABot-N0 — это первая основополагающая модель навигации на базе VLA, объединяющая пять основных навигационных задач: навигация из точки в точку, навигация по объекту, следование инструкциям, навигация по точке интереса и следование за пешеходом.
Она использует иерархическую архитектуру «мозг — действие»: когнитивный модуль на основе предварительно обученной большой языковой модели отвечает за семантическое понимание и декомпозицию задач, в то время как эксперты по действиям генерируют точные траектории с помощью потокового согласования.
AutoNavi создала движок навигационных данных примерно с 8 000 высокоточных 3D-сцен и почти 17 миллионами экспертных демонстраций. Модель установила новые рекорды по семи основным бенчмаркам, включая CityWalker, SocNav, R2R-CE/RxR-CE и HM3D-OVON. В симуляции SocNav с замкнутым циклом показатель успешности увеличился на 40,5%, а успешность навигации по объектам в HM3D-OVON выросла на 8,8%.
AutoNavi заявила, что ABot-N0 уже развернута на реальных четвероногих роботах, обеспечивая эффективное инференсное выполнение на периферийных устройствах и управление с замкнутым циклом.
Всегда имейте в виду, что редакции могут придерживаться предвзятых взглядов в освещении новостей.
Автор – Pandaily



