
Институт междисциплинарных информационных наук Университета Цинхуа совместно с Шанхайским институтом Ци Чжи представили Project-Instinct — фреймворк с открытым исходным кодом, разработанный для поддержки интеллекта на уровне инстинктов в области движения гуманоидных роботов.
Этот фреймворк предоставляет полнофункциональный модульный инструментарий (toolchain), который позволяет исследователям разрабатывать сложные возможности локомоции — такие как скоростной паркур или походы по пересечённой местности — в рамках единой кодовой базы.
Под «интеллектом на уровне инстинктов» понимается способность робота автономно реагировать на сложный рельеф и непредвиденные условия без опоры на заранее заданные траектории движения, используя восприятие в реальном времени по аналогии с человеческими рефлексами. Project-Instinct объединяет три ключевых набора инструментов: InstinctLab (для настройки сценариев и данных), instinct_rl (для обучения с подкреплением) и instinct_onboard (для развёртывания в реальном мире), решая давние проблемы, такие как фрагментированные конвейеры восприятия-движения и непереиспользуемые инструментарии.
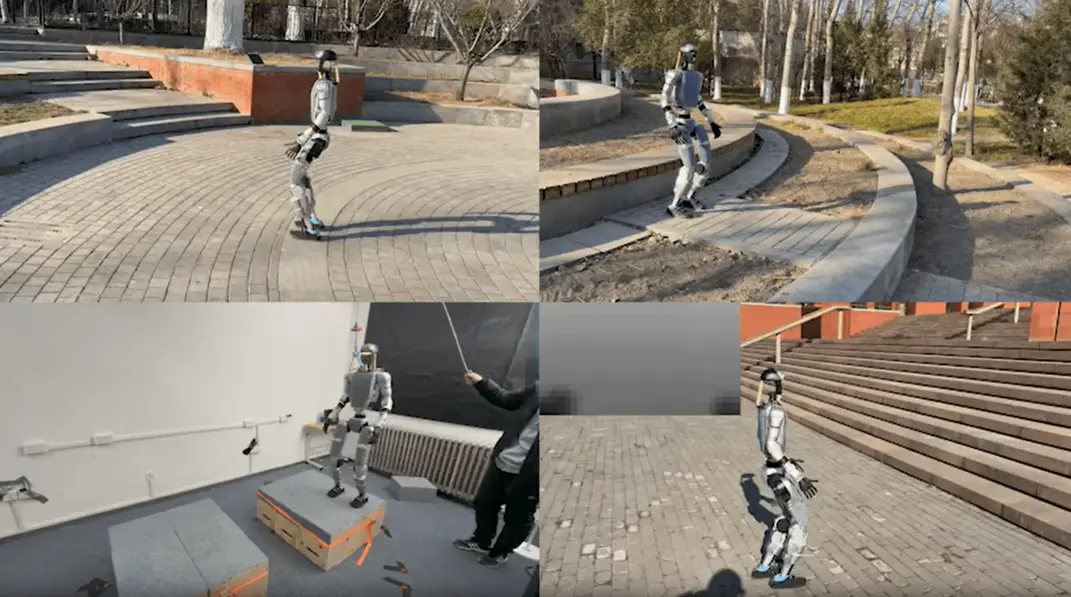
Исследовательская группа уже продемонстрировала две передовые возможности с использованием этого фреймворка. Первая, DeepWhole-bodyParkour, позволяет роботам выполнять высокодинамичные движения с множественными контактами — такие как ползание на коленях, ныряющие кувырки и перелезание через платформы — автономно корректируя позиционные отклонения, достигая 100% успешности. Вторая, Hiking in the Wild, даёт роботам возможность перемещаться по лугам, каменистой местности и рвам со скоростью до 2,5 метров в секунду, с автономным обходом препятствий.
Фреймворк полностью открыт для общего доступа с целью снижения барьеров для исследований и ускорения прорывов в области локомоции гуманоидных роботов.
Источник: QbitAI
Всегда имейте в виду, что редакции могут придерживаться предвзятых взглядов в освещении новостей.
Автор – Pandaily



